|
Qi Lv (吕奇)
I am a third-year Ph.D. student at Harbin Institute of Technology (Shenzhen) and Great Bay
University, advised by Liqiang Nie (IARP
Fellow), and Michael Yu Wang
(IEEE/ASME/HKIE Fellow), and co-supervised by Xiang Deng.
Currently I am a visiting student at the National University of Singapore, working with Mike Shou.
Before, I received M.S and B.E from Soochow University.
|

|
Selected Publication
(
|
|
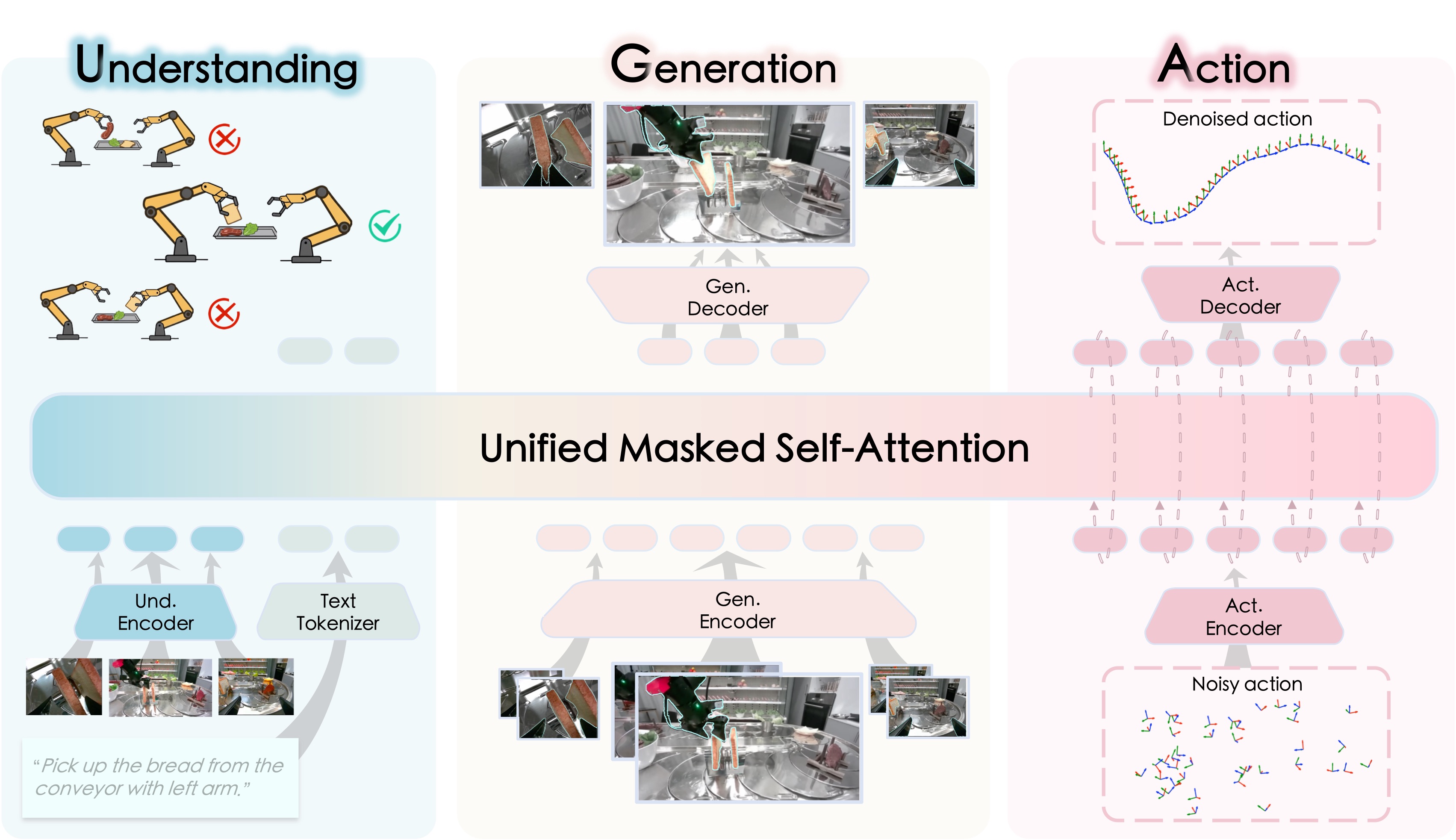
InternVLA-A1: Unifying Understanding, Generation and Action for Robotic Manipulation
InternVLA-A1 Team arxiv, 2025 project page / arXiv / code / data InternVLA-A1 unifies scene understanding, visual foresight, and action execution into a single framework. Moreover, it is empowered by high-fidelity synthetic data (InternData-A1). |
|
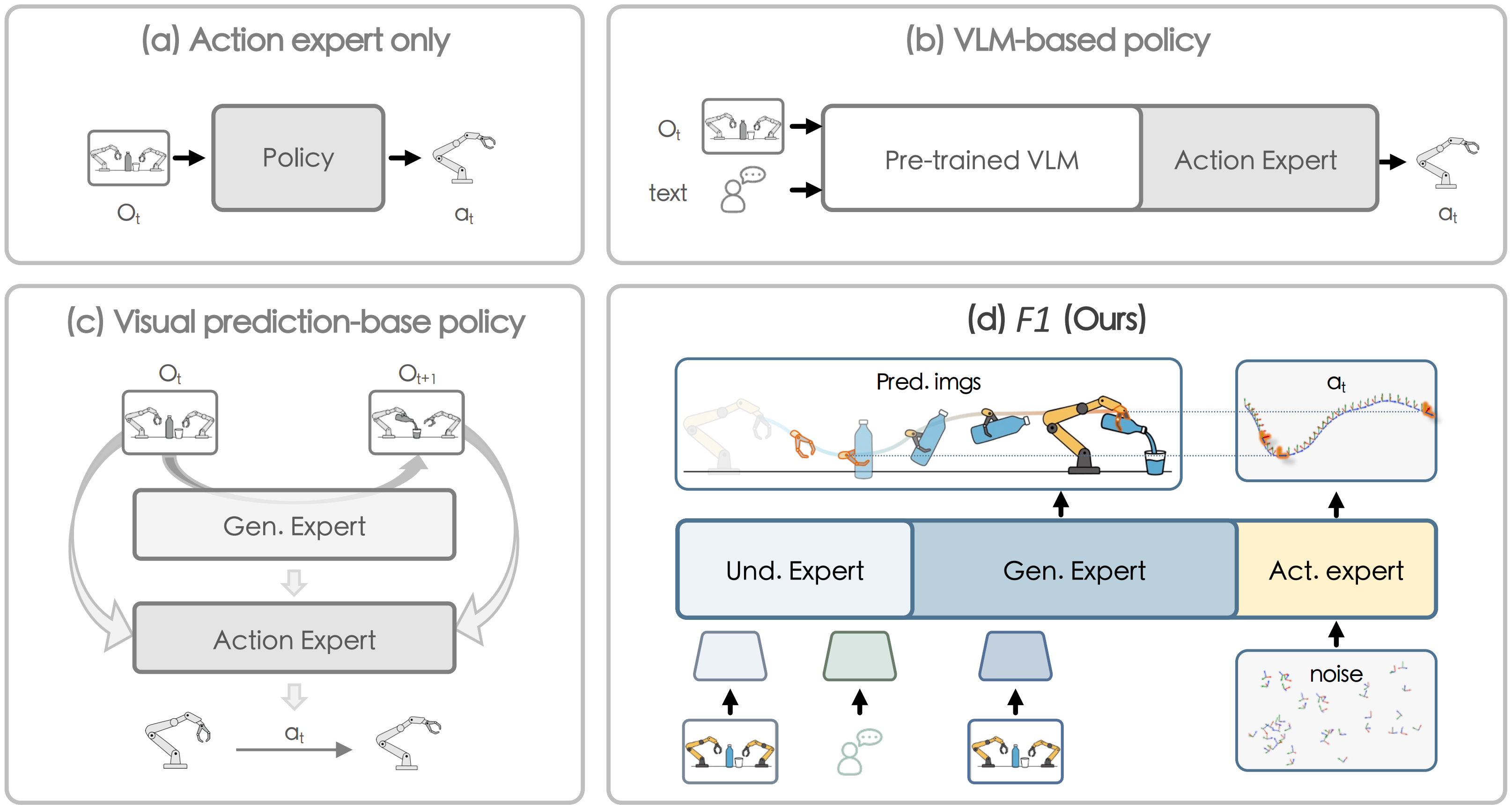
F1: A Vision-Language-Action Model Bridging Understanding and Generation to Actions
Qi Lv arxiv, 2025 project page / arXiv / code A novel paradigm integrating visual foresight generation into the decision-making pipeline, enabling robots to plan and execute complex tasks in dynamic environments. |
|
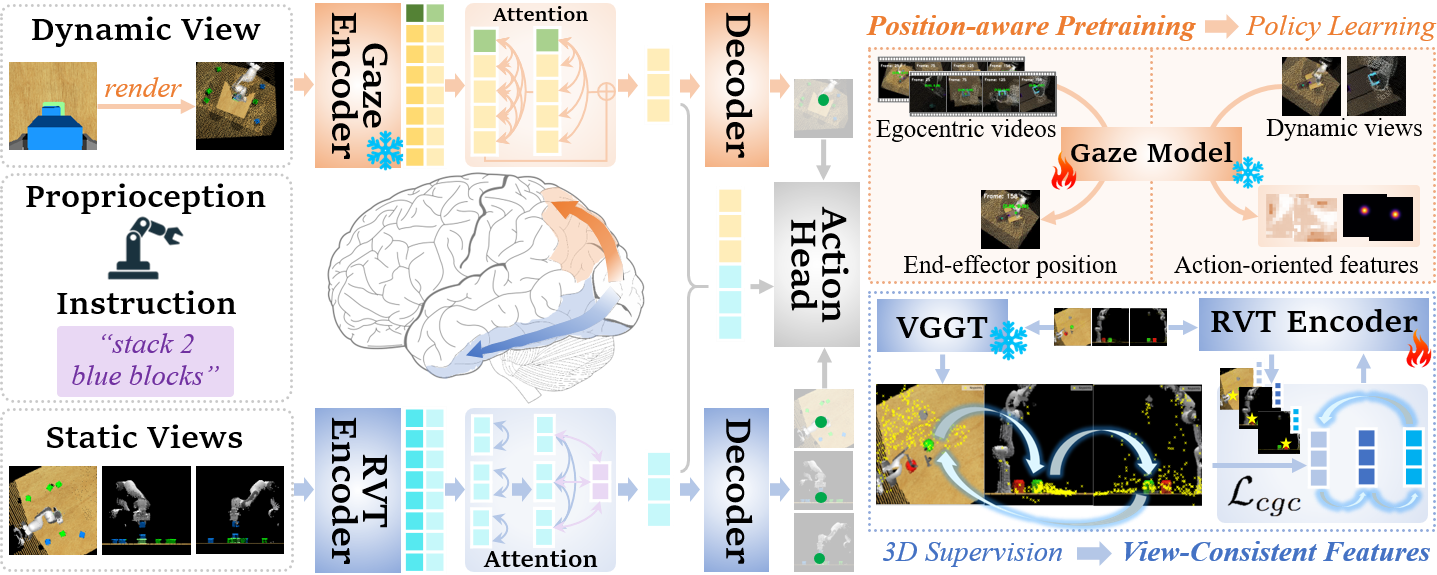
Cortical Policy: A Dual-Stream View Transformer for Robotic Manipulation
Xuening Zhang, Xiang Deng, Qi Lv, Miao Zhang, Xingbo Liu, Liqiang Nie ICLR, 2026 Openreview We propose Cortical Policy, a cortex-inspired dual-stream view transformer for robotic manipulation that jointly reasons over static views (for 3D spatial understanding via pretrained 3D keypoint alignment) and dynamic views (for adaptive behavior via egocentric gaze–aware pretraining). |
|
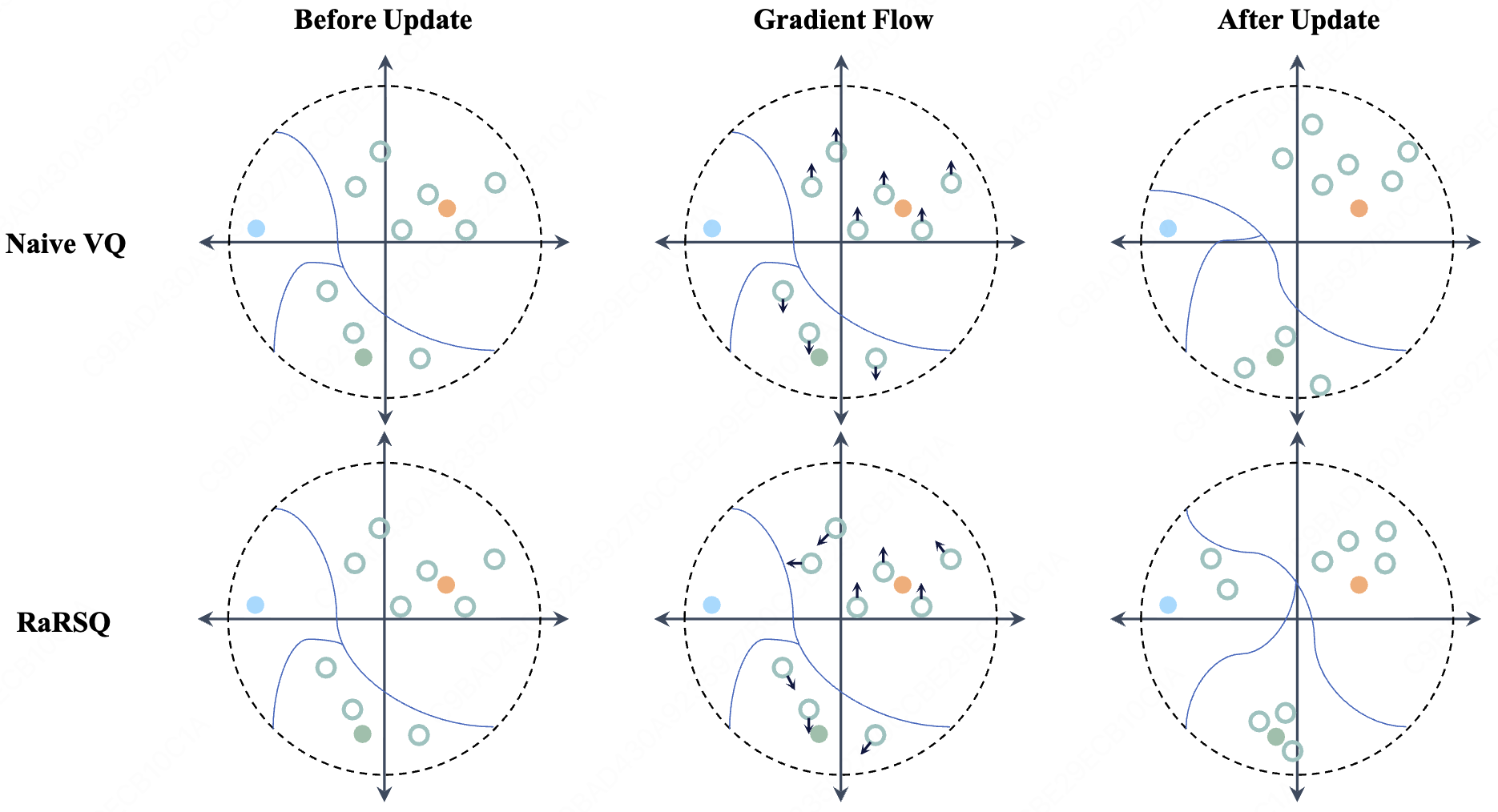
STAR: Learning Diverse Robot Skill Abstractions through Rotation-Augmented Vector Quantization
Hao Li, Qi Lv, Rui Shao, Xiang Deng, Yinchuan Li, Jianye Hao, Liqiang Nie ICML, 2025, Spotlight arXiv / code A framework for robust skill learning and composition that mitigates codebook collapse and models causal dependencies between skills, by introducing rotation-augmented skill quantization and a causal skill transformer. |
|
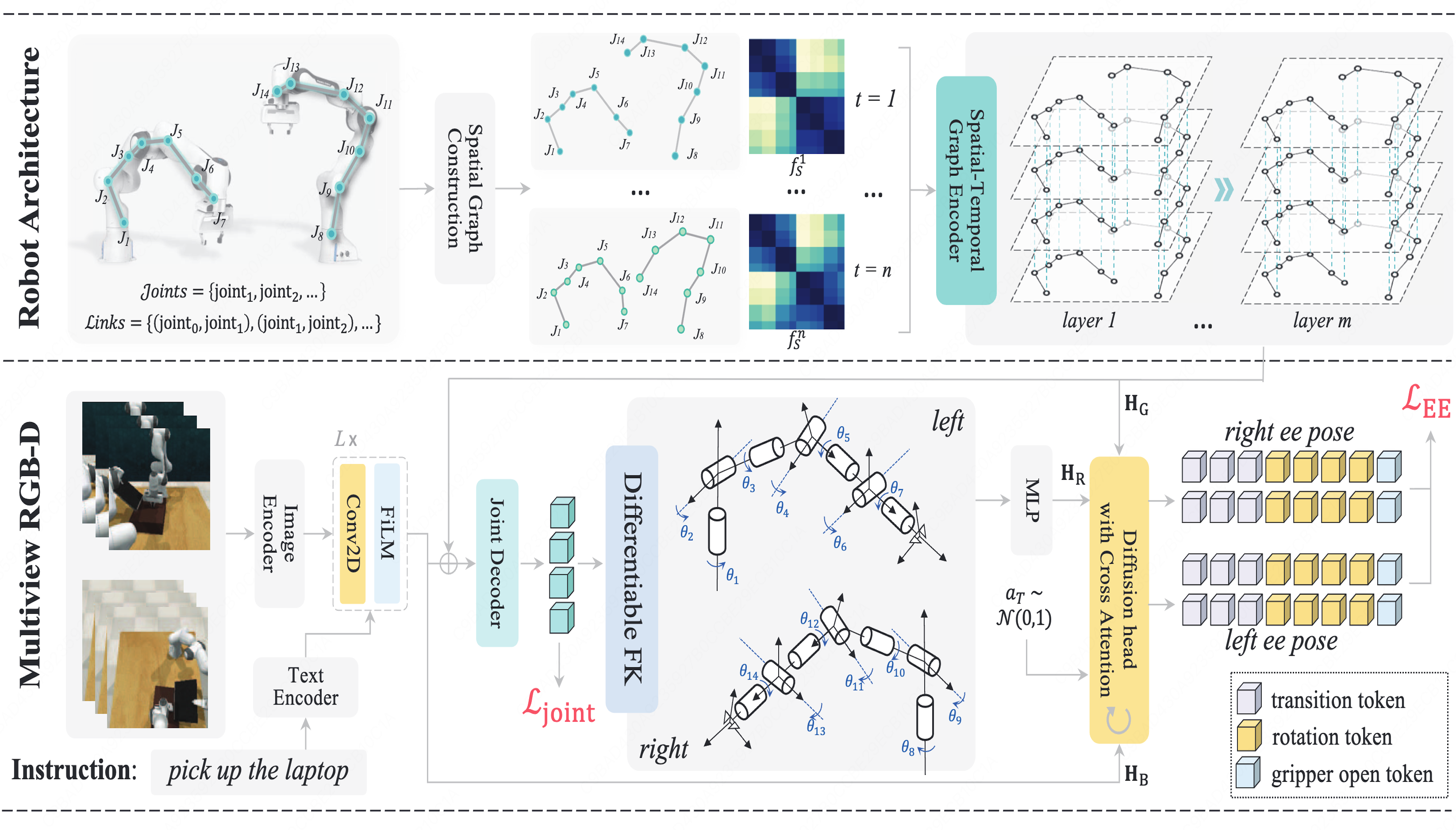
Spatial-Temporal Graph Diffusion Policy with Kinematic Modeling for Bimanual Robotic Manipulation
Qi Lv, Hao Li, Xiang Deng, Rui Shao, Yinchuan Li, Jianye Hao, Longxiang Gao, Michael Yu Wang, Liqiang Nie CVPR, 2025 arXiv KStar Diffuser leverages dynamic spatial-temporal robot graphs and differentiable kinematics to produce physically feasible, structure-aware bimanual manipulation policies. |
|
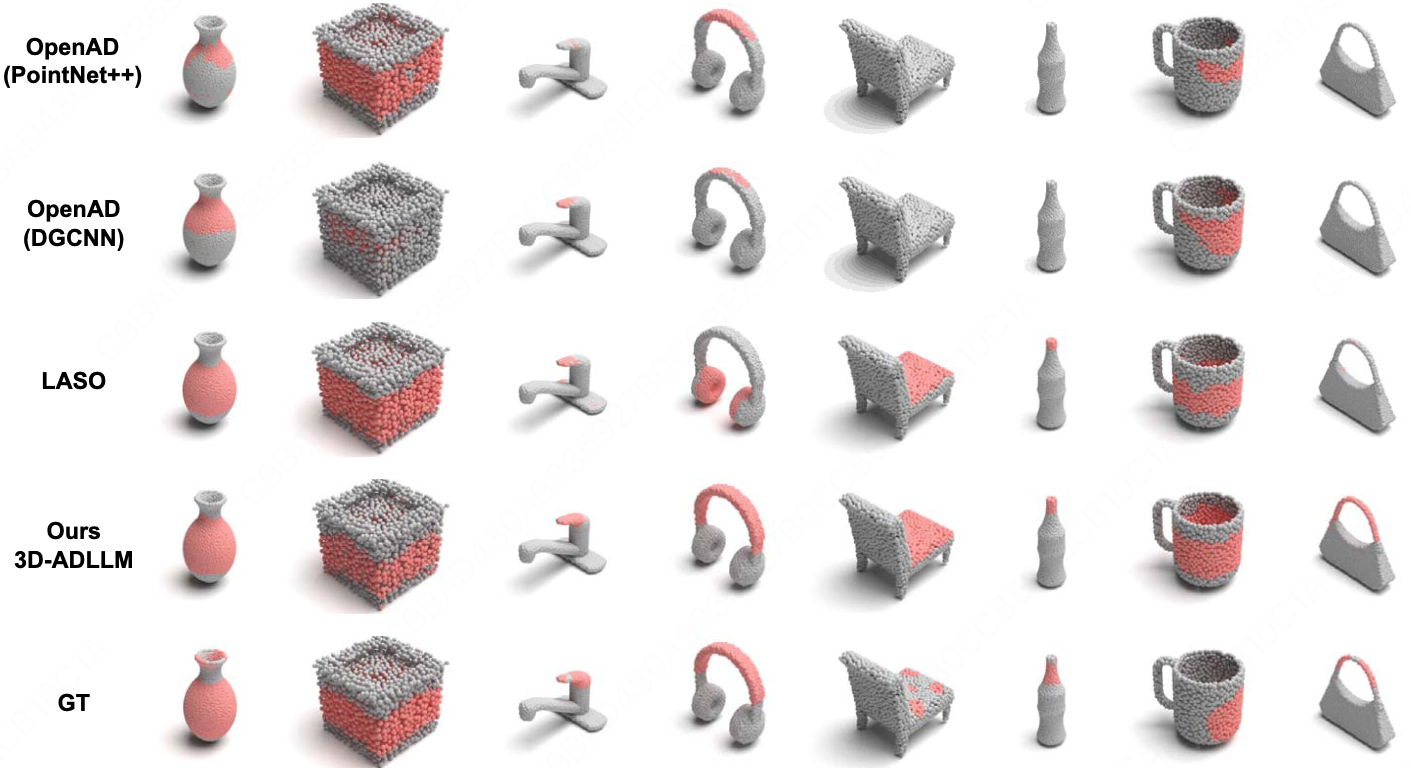
3D-AffordanceLLM: Harnessing Large Language Models for Open-Vocabulary Affordance Detection in 3D Worlds
Hengshuo Chu, Xiang Deng, Qi Lv, Xiaoyang Chen, Yinchuan Li, Jianye Hao, Liqiang Nie ICLR, 2025 arXiv We formulates 3D affordance detection as a language-driven reasoning task for open-world scenes. By integrating LLM reasoning and multi-stage training, it achieves improved open-vocabulary affordance segmentation. |
|
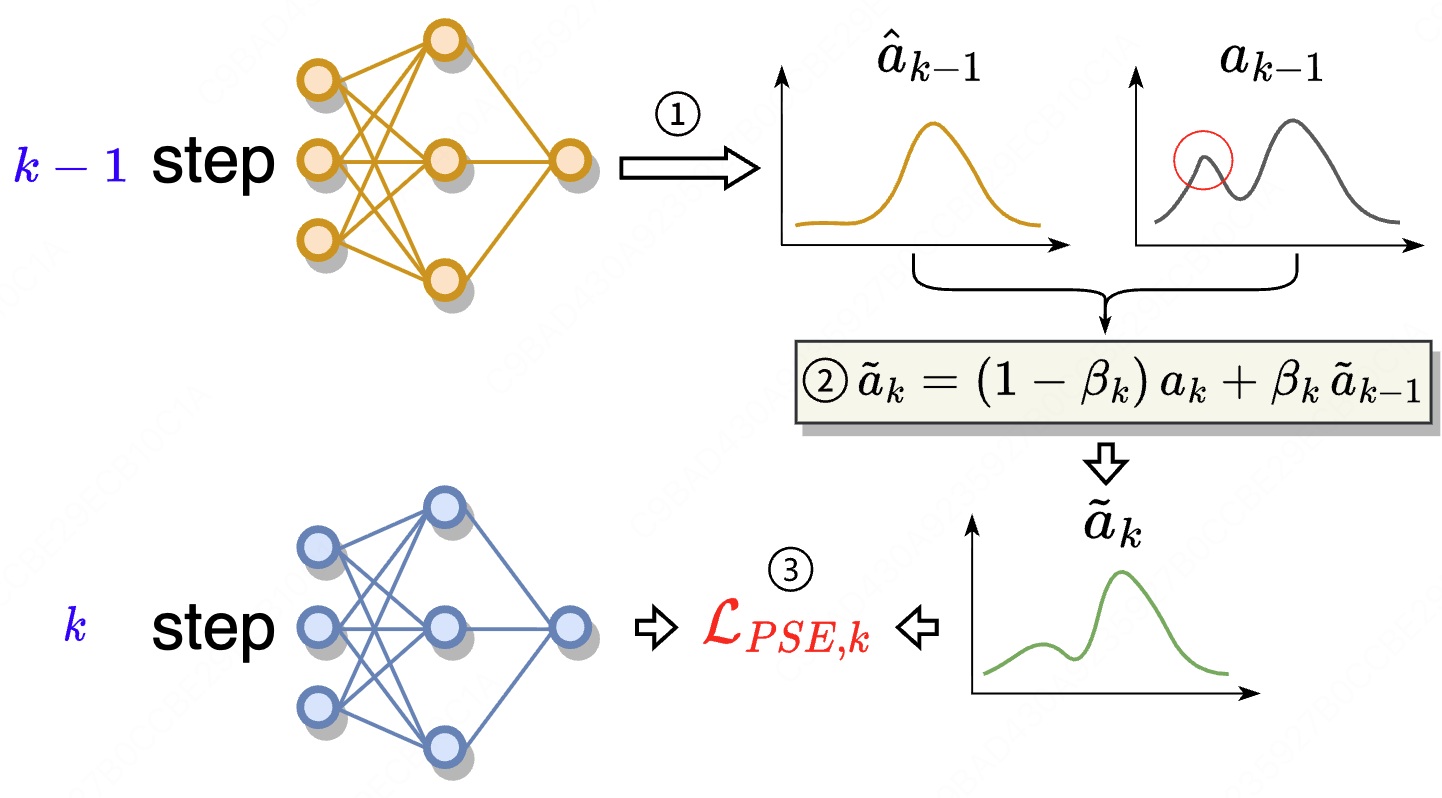
Decision Mamba: A Multi-Grained State Space Model with Self-Evolution Regularization for Offline RL
Qi Lv, Xiang Deng, Gongwei Chen, Michael Yu Wang, Liqiang Nie NeurIPS, 2024 arXiv / code We introduces a novel multi-grained Mamba architecture that jointly models historical hidden states and intra-step RTG–state–action relations, enabling more robust offline RL under out-of-distribution settings. |
|
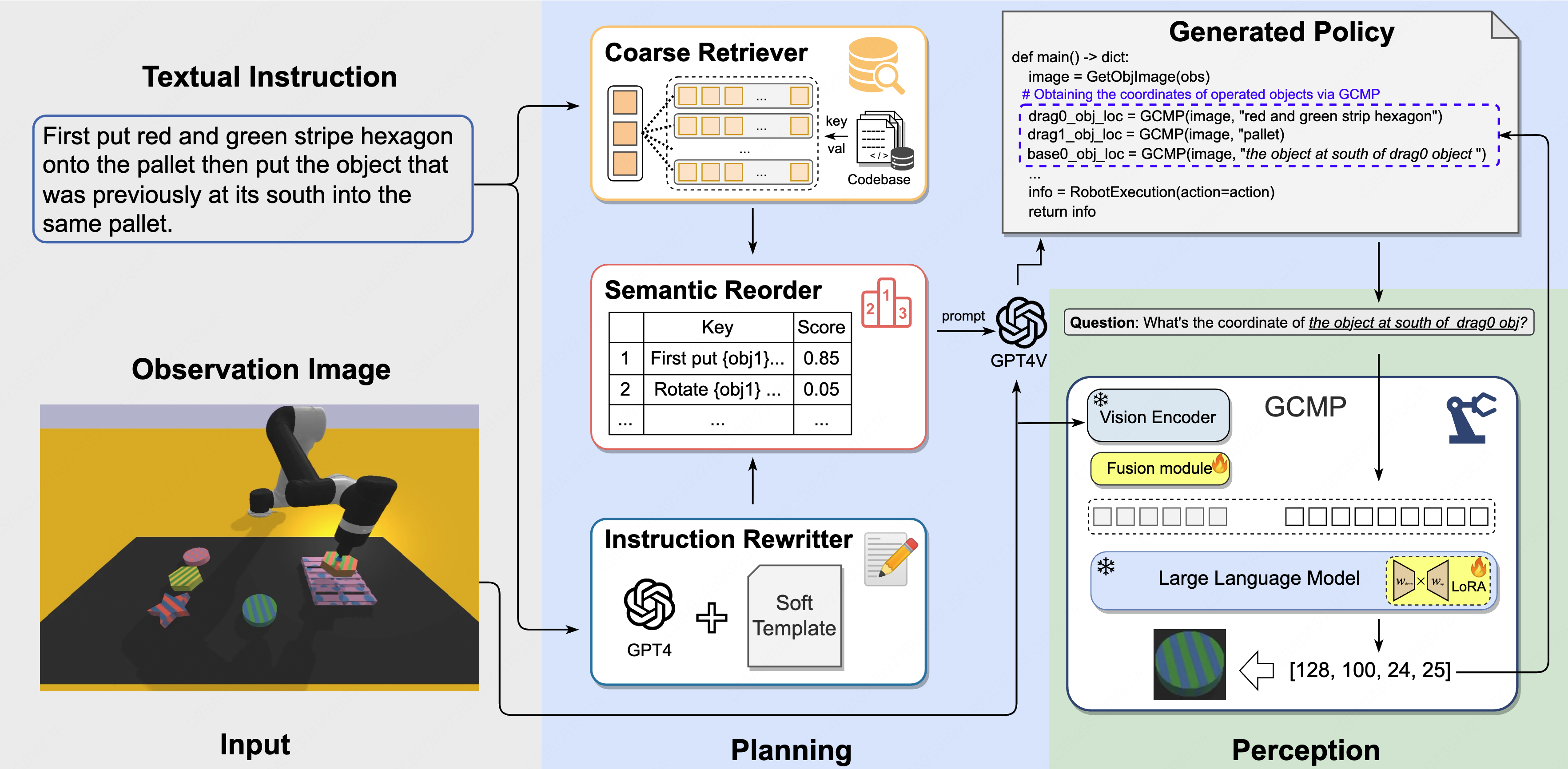
RoboMP2: A Robotic Multimodal Perception-Planning Framework with Multimodal Large Language Models
Qi Lv, Hao Li, Xiang Deng, Rui Shao, Michael Yu Wang, Liqiang Nie ICML, 2024 project page / arXiv / code A multimodal perception–planning framework that grounds MLLM reasoning in embodied robotic manipulation. It improves generalization by combining goal-conditioned perception with retrieval-augmented planning. |
Education & Experience |
|
•
Harbin Institute of Technology (Shenzhen)
2023.09 - Present
Ph.D. in Electronic Information, School of Computer Science and Technology
Advised by Liqiang Nie and Xiang Deng |
|
•
Great Bay University
2023.09 - Present
Ph.D. in Electronic Information, School of Engineering
Advised by Michael Yu Wang |
|
•
National University of Singapore
2025.10 - Present
Visiting student, College of Design and Engineering
Advised by Mike Shou |
|
•
Soochow University
2020.09 - 2023.06
M.S. in Computer Science and Technology, School of Computer Science and Technology
Advised by Guohong Fu |
|
•
Soochow University
2014.09 - 2018.06
B.S. in Software Engineering, School of Computer Science and Technology
|
Award |
| •Champion Award, RoboSpatial, CVPR Challenge 2026.06 |
| •Runner-up Award, PointArena, CVPR Challenge 2026.06 |
| •National Scholarship, Ministry of Education of China 2025.10 |
| •InnoVibe Rising Star, Beijing Academy of Artificial Intelligence (BAAI) 2025.06 |
| •Excellent Student Award, Harbin Institute of Technology 2024.12 |
| •Runner-up Award, EgoPlan, ICML Challenge 2024.07 |
| •Silver medal, Feedback Prize, Kaggle Competition 2022.08 |
| •First Prize, Jiangsu Province College AI Algorithm Challenge 2022.01 |
Academic Service |
| •Conference Reviewer: ICLR, NeurIPS, ICML, CVPR and ACL. |
| •Journal Reviewer: TIP and TALLIP. |
|
Last updated: July 2026 Template by Jon Barron. |